DeepAF(2025):基于Transformer的深度数据关联与跟踪过滤网络在杂波中多目标跟踪中的应用
导出时间:2025/11/24 09:08:28
1、研究背景和动机
研究背景(问题语境)
- 多目标跟踪(MTT)在雷达处理中属于核心任务:输入是各扫描时刻的量测,输出是对应真实目标的多条航迹;传统“关联式框架”以“轨迹起始→数据关联→轨迹滤波”循环执行。
- 经典的数据关联方法包括 NN、PDA、JPDA、MHT。NN只选“一对一”最佳量测,结果易不稳定;PDA对门限内多量测加权,工程稳定性更好;而JPDA/MHT要处理联合事件,目标数一多就易出现组合爆炸、计算量陡增。
- 传统滤波/关联流水线还常依赖手工设置与真实运动模型匹配的状态转移矩阵(如在不同CV/CA/CT模型间切换),在复杂、变化的场景中难以及时、准确获取这些先验。
动机(为什么需要DeepAF)
- 将数据关联与轨迹滤波合并为统一、端到端的可学习框架,避免“先关联再滤波”的多阶段误差传播与工程耦合,降低人工先验依赖与调参负担。DeepAF正是为此而设计,网络同时完成关联与滤波,结构统一、计算量小。
- 利用Transformer对时序/集合信息建模,直接从量测与历史航迹中学习状态更新规律,使模型在不同运动模型(CV/CA/CT)下都能以同一套权重稳定工作,从而减少模型切换与配置开销。
- 实验动因:在复杂杂波与机动目标场景中,DeepAF展现出与PHD/PDA相当或更优的精度,且时间开销更低,验证了端到端联合建模的现实价值,这进一步驱动了对该方向的系统化研究。
一句话概括:
在传统“先关联、再滤波”的框架面临先验依赖强、计算复杂、跨模型切换繁琐的痛点下,DeepAF以Transformer为基础,把关联+滤波合二为一,力图在复杂杂波中以统一、端到端的方式实现稳定、准确、低时延的多目标跟踪。
2、总体创新概述
1️⃣ 将“数据关联 + 轨迹滤波”合二为一的端到端框架
- 以往问题:传统 MTT 流程是 分阶段的:先做数据关联,再用卡尔曼滤波或其变体更新目标状态。这种拆分方式容易产生误差累积,且各阶段往往需要手工配置和调优。
- DeepAF 创新:将 数据关联 (Data Association) 和 状态滤波 (Track Filtering) 融合进一个统一的深度网络中,通过端到端训练,直接从历史轨迹与新量测推断出最佳匹配并更新目标状态。
- 优势:
- 减少阶段间误差传递;
- 弱化对人工先验(如运动模型选择、杂波密度设置)的依赖;
- 简化工程部署和调参工作 。
🔍 通俗比喻:以前像“先找出谁是谁,再交给另一个部门更新信息”;DeepAF 相当于把两个部门合并成一个智能系统,一次性搞定匹配和更新。
2️⃣ 引入 Transformer 自注意力机制 捕获时序与全局交互
- 以往问题:LSTM 虽能处理时序信息,但在长时间依赖和多目标交互上存在限制;当目标数量多、轨迹交叉时性能下降。
- DeepAF 创新:用 Transformer 编码器替代 RNN/LSTM:
- 自注意力 (Self-Attention) 能全局建模目标间的关联;
- 可以同时关注历史多帧轨迹与当前量测;
- 并行处理带来更高的效率和可扩展性。
- 优势:
- 在机动目标、复杂交互、轨迹交叉场景下更稳定;
- 推理速度优于逐步序列处理的 RNN 。
🔍 通俗比喻:LSTM 是按顺序读历史记录的“秘书”,Transformer 是能同时看全局信息的“指挥官”。
3️⃣ 统一处理不同运动模型(CV/CA/CT)
- 以往问题:传统滤波必须针对不同运动模式(匀速、加速度、转弯等)选择或切换模型,增加复杂度和人工成本。
- DeepAF 创新:通过端到端学习,直接利用 Transformer 提取时序和动态特征,无需显式指定或切换 CV/CA/CT 模型。
- 优势:
- 提高对多类目标机动的适应性;
- 避免频繁调参和模型切换 。
4️⃣ 结构紧凑、计算高效
- 以往问题:一些深度 MTT 方法虽然准确度高,但网络复杂、计算量大,难以在实时机载雷达中部署。
- DeepAF 创新:设计了 轻量级 Transformer 架构 和高效的推理流程,实验证明其计算量比同类端到端 MTT 方法低,同时保持或超越其跟踪精度 。
5️⃣ 改进的数据关联概率输出与轨迹维护机制
- 创新细节:
- 网络直接输出数据关联概率矩阵,简化传统基于匈牙利算法或贝叶斯假设的复杂流程;
- 将轨迹管理(新生、终止、保持)与状态更新结合到统一框架中,提高稳定性和鲁棒性。
- 优势:减少对传统启发式关联算法(如 JPDA、MHT)的依赖,模型适应性更强。
与之前模型对比
特性
| 传统 JPDA/MHT
| DeepDA (LSTM)
| DeepAF (Transformer)
|
数据关联
| 概率/组合推断
| LSTM 学习关联概率
| Transformer 自注意力,端到端关联
|
状态更新
| 独立滤波器(卡尔曼/IMM)
| 仍需独立滤波器
| 网络内嵌滤波功能,一体化
|
运动模型
| 需手工选择 CV/CA/CT
| 偏向简单运动假设
| 统一学习多运动模型
|
可扩展性
| 计算爆炸
| 依赖序列处理,速度有限
| 并行高效,可扩展
|
先验依赖
| 高
| 中
| 低
|
总结一句话
DeepAF 的核心创新在于: 用 Transformer 构建了一个端到端的“关联 + 滤波”统一模型,实现全局时序建模、自动适应不同运动模式,并以更高效率和更少先验依赖完成多目标雷达跟踪,为复杂杂波和机动目标环境提供了一种简洁而强大的解决方案 。
模型整体结构与工作流程
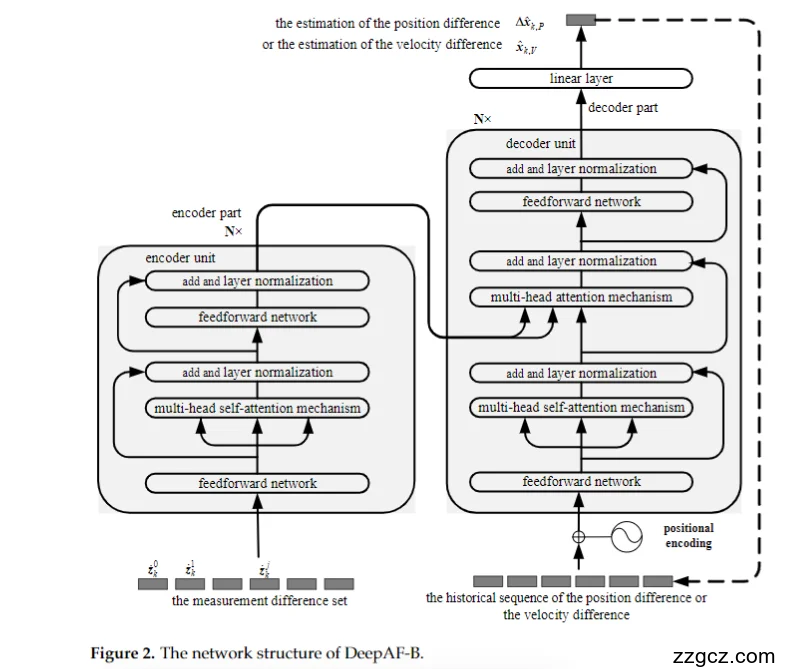
DeepAF 模型整体上是一个 基于 Transformer 的编码器-解码器架构,用来实现 数据关联与轨迹滤波的端到端联合建模。
网络主要由 输入特征构造 → 编码器 (Encoder) → 解码器 (Decoder) → 输出状态差估计 四个关键部分组成。
(1) 输入特征构造
- 输入包含两类序列:
- 历史状态差序列:每个目标在历史时刻的 位置差或速度差(例如真实轨迹与上一预测值的偏差),用来反映目标的动态变化趋势。
- 当前时刻的量测差集:当前帧每个检测点与预测状态之间的差异,如位置偏差或速度偏差。
- 通过这种“差值编码”,模型输入的特征与绝对坐标无关,更关注动态变化模式,便于泛化到不同场景。
- 位置编码 (Positional Encoding):在历史序列端加入时间顺序信息,让 Transformer 能识别帧的时序关系。
🔍 直观理解: 网络输入不是原始坐标,而是“预测和观测之间的差值”,帮助模型专注于“偏离趋势”,不依赖绝对位置坐标。
(2) 编码器(Encoder Part)
- 编码器由多个 Encoder Unit 堆叠而成,每个单元包含:
- 多头自注意力 (Multi-Head Self-Attention):在当前输入序列内部建立全局依赖,找出不同目标状态之间的潜在交互和时序模式;
- 前馈网络 (Feedforward Network):对注意力提取的特征进行非线性变换;
- 残差连接 + 层归一化 (Add & Layer Normalization):保持训练稳定,避免梯度消失。
- 编码器的作用是对输入的 量测差集 进行全局特征抽取,形成一个包含目标动态和量测关系的高维表示。
🔍 直观理解: 编码器像一个“全局分析师”,在当前帧的所有量测差之间建立相互关系,理解谁更可能是同一目标的观测。
(3) 解码器(Decoder Part)
- 解码器同样由多个 Decoder Unit 堆叠,每个单元包括:
- 自注意力 (Self-Attention):在历史轨迹序列内部建立时序依赖,捕获目标历史运动规律;
- 交叉注意力 (Multi-Head Attention):将解码器历史轨迹特征与编码器输出的量测特征进行对齐,实现“历史预测”与“当前观测”的信息交互;
- 前馈网络 + 残差 & 归一化:进行特征变换和稳定训练。
- 解码器将 历史轨迹动态 和 当前量测差特征 融合,输出最可能的状态更新信息。
🔍 直观理解: 解码器像一个“对比专家”,把过去的运动习惯和当前的测量点进行全局比对,从而判断每个轨迹应该如何更新。
(4) 输出层(Linear Layer)
- 最上方的 线性层 (Linear Layer) 将解码器的输出映射为:
- 位置差估计 Δx^k,p\Delta \hat{x}_{k,p}Δx^k,p
- 或 速度差估计 Δx^k,v\Delta \hat{x}_{k,v}Δx^k,v
- 这相当于直接给出每个目标在当前时刻的状态更新量,从而完成滤波和关联的统一推理。
🔍 直观理解: 最后的线性层就像一个“结论生成器”,把所有上下文综合后,直接告诉每条轨迹应该怎么更新。
(5) 工作流程总结
- 特征准备
- 历史轨迹转换为位置/速度差序列(加入时间编码);
- 当前帧的检测点转换为预测差值集合。
- 编码器全局建模
- 对当前帧量测差集做多头自注意力,提取全局测量模式。
- 解码器融合历史与当前信息
- 自注意力分析历史轨迹;
- 交叉注意力匹配历史与当前量测。
- 输出状态更新
- 线性层输出轨迹位置/速度差,用以更新目标状态。
与传统方法对比
特性
| DeepDA (LSTM)
| DeepAF (Transformer)
|
输入特征
| 原始状态序列
| 状态差(位置/速度差),加入位置编码
|
序列建模
| LSTM 单向
| Transformer 全局注意力
|
数据关联
| Softmax 概率
| 直接输出状态更新 + 隐式关联
|
滤波
| 外部卡尔曼滤波
| 内置状态差估计,端到端
|
一句话总结
DeepAF 的结构像一个“智能指挥官”: 编码器理解当前量测的全局关系,解码器将这些量测与历史运动特征进行对比,再直接输出轨迹更新量。它把过去“关联+滤波”两个独立模块整合成了一个统一的 Transformer 网络,实现了端到端的多目标跟踪。
模型的核心不足与局限
- 对训练数据和场景一致性依赖较强
- 原因:DeepAF 完全通过监督学习训练,模型要从大量标注轨迹中学习关联与滤波规律。
- 问题:机载雷达、地面监视等实际环境差异大(杂波密度、检测概率、目标机动特性、传感器参数等),一旦部署环境与训练数据差异较大,模型性能可能急剧下降。
- 影响:需要在新场景重新收集和标注大量训练数据;泛化能力受限。
- 对比:传统 JPDA/MHT 虽然性能有限,但只需调整先验参数就能适应不同环境。
🔍 直观理解:DeepAF 像一个只在熟悉机场训练过的指挥员,换到陌生机场可能就不适应。
- 计算和存储开销仍然较大
- 原因:Transformer 的自注意力机制在输入长度(历史轨迹数 × 目标数)较大时计算复杂度为 O(n2)。
- 影响:在目标数量多、雷达帧率高的实时任务中,推理速度和内存消耗仍是潜在瓶颈。
- 改进方向:需要采用稀疏注意力、轻量化 Transformer 或模型压缩等技术。
- 对比:LSTM/DeepDA 在复杂度上相对更可控,但时序建模能力不如 Transformer。
- 缺少严格的不确定性建模与可解释性
- 问题:虽然 DeepAF 输出关联概率或状态更新,但这些概率是神经网络“学习出来的分数”,缺少严格的统计意义。
- 影响:在高风险场景(如军事雷达),很难直接用 DeepAF 的置信度做决策;模型缺乏可解释性。
- 对比:JPDA/MHT 的概率输出有清晰的数学推导,可解释且便于置信度分析。
🔍 直观理解:DeepAF 会给出一个“看起来很确定的匹配”,但缺乏告诉你“为什么”以及“确定性有多强”。
- 对动态变化和在线适应能力不足
- 原因:模型训练完成后参数固定,无法在运行中根据杂波密度、检测概率变化或目标运动模式漂移进行自适应更新。
- 影响:需要人工定期重新训练;在长期运行或环境快速变化时可能性能衰退。
- 对比:一些贝叶斯跟踪方法能实时估计检测率、杂波强度,具备在线调整能力。
- 极端目标密度或极端稀疏场景表现受限
- 问题:DeepAF 默认输入的目标/量测数处于适中范围;当目标极多时注意力矩阵过大,计算和关联可靠性下降;当目标极少或大量漏检时,网络训练样本分布与实际不符,关联会不稳定。
- 影响:在空战、海上监视等极端高机动或杂波环境下易出现轨迹漂移、漏检或虚假关联。
- 模态单一,未充分利用多传感器/外观信息
- 问题:DeepAF 主要基于运动差值特征(位置差、速度差),缺少对雷达信号微结构或外观特征(如 RCS、视觉特征)的利用。
- 影响:当轨迹交叉、运动模式相似时区分能力不足。
- 改进方向:融合毫米波雷达点云、视觉图像或其他传感器信息。
- 工程落地与安全验证难度高
- 问题:模型需要大量标注、网络复杂,且输出缺少数学可解释性;在航空航天或军事系统中,模型验证和安全认证周期较长。
- 影响:短期内难以完全替代成熟的概率跟踪方案,只能作为增强或混合模块使用。