在多个 GPU 上高效训练¶
如果你发现单个 GPU 训练模型太慢,或者模型的权重无法容纳在单个 GPU 的内存中,那么过渡到多 GPU 配置可能是一个可行的选择。在进行这一转变之前,请务必彻底探索所有在单个 GPU 上提高训练效率的方法(详见单 GPU 高效训练方法和工具),因为这些方法适用于任何数量的 GPU 训练。一旦你应用了这些方法并且发现它们在单个 GPU 上仍然不足,再考虑转向多个 GPU。
从单个 GPU 到多个 GPU 的过渡需要引入某种形式的并行处理,因为工作负载需要分布在资源上。可以采用多种技术来实现并行处理,例如数据并行处理(Data Parallelism)、张量并行处理(Tensor Parallelism)和流水线并行处理(Pipeline Parallelism)。需要注意的是,并没有一种通用的最佳方案,最佳设置取决于你所使用的具体硬件配置。
本指南深入介绍了各种类型的并行处理,并提供了如何组合技术以及选择合适方法的指导。有关分布式训练的逐步教程,请参阅🤗 Accelerate 文档。
虽然本指南讨论的主要概念可能适用于各种框架,但这里我们重点介绍基于 PyTorch 的实现。
在深入探讨每种技术的具体细节之前,让我们先了解一下在大型基础设施上训练大型模型时的决策过程。
可扩展性策略¶
首先估算训练模型所需的显存(vRAM)。对于托管在 🤗 Hub 上的模型,可以使用我们的模型内存计算器,该计算器可以提供准确的结果,误差范围在几个百分点内。
单节点/多 GPU 配置的并行化策略¶
当在一个节点上使用多个 GPU 训练模型时,选择合适的并行化策略对性能有显著影响。以下是你的选项:
情况 1:模型可以容纳在单个 GPU 上
如果模型可以舒适地容纳在一个 GPU 上,你有两个主要选项:
- DDP - 分布式数据并行(Distributed DataParallel)
- ZeRO 冗余优化器(ZeRO) - 根据具体情况和配置,这种方法可能更快或更慢,但值得一试。
情况 2:模型无法容纳在单个 GPU 上
如果模型太大无法容纳在一个 GPU 上,你有几种选择:
- 流水线并行(PipelineParallel,简称 PP)
- ZeRO
- 张量并行(TensorParallel,简称 TP)
如果有非常快速的节点间连接(例如 NVLINK 或 NVSwitch),上述三种策略(PP、ZeRO、TP)的性能应该相似。然而,如果没有这些高速连接,PP 的性能会优于 TP 或 ZeRO。TP 的程度也可能有所不同。最好针对你的具体设置进行实验以确定最合适的策略。
TP 几乎总是用于单个节点内,即 TP 大小 ≤ 每个节点的 GPU 数量。
情况 3:模型的最大层无法容纳在单个 GPU 上
- 如果你不使用 ZeRO,必须使用张量并行(TP),因为仅使用流水线并行(PP)不足以容纳大层。
- 如果你使用 ZeRO,还需采用单 GPU 高效训练方法和工具中的技术。
多节点/多 GPU 配置的并行化策略¶
当你有快速的节点间连接(例如 NVLINK 或 NVSwitch)时,可以考虑以下选项:
- ZeRO - 因为它几乎不需要对模型进行修改。
- 流水线并行(PP)与张量并行(TP)和数据并行(DP)的组合 - 这种方法会减少通信次数,但需要对模型进行大量修改。
当你有较慢的节点间连接且 GPU 内存较低时:
- 使用数据并行(DP)与流水线并行(PP)、张量并行(TP)和 ZeRO 的组合。
在本指南的后续部分,我们将深入探讨这些不同的并行化方法是如何工作的。
数据并行(Data Parallelism)¶
即使只有 2 个 GPU,你也可以利用 PyTorch 内置功能(如 DataParallel (DP) 和 DistributedDataParallel (DDP))提供的加速训练能力。请注意,PyTorch 文档建议在多 GPU 训练时优先使用 DistributedDataParallel (DDP) 而不是 DataParallel (DP),因为它适用于所有模型。让我们看看这两种方法的工作原理及其不同之处。
DataParallel 与 DistributedDataParallel¶
为了理解这两种方法在 GPU 间通信开销上的关键差异,我们来回顾一下每个批次的过程:
DDP:
- 在开始时,主进程从 GPU 0 将模型复制到其他 GPU。
- 然后对于每个批次:
- 每个 GPU 直接消耗其小批量数据。
- 在
backward阶段,一旦本地梯度准备好,它们会在所有进程中平均。
DP:
对于每个批次:
- GPU 0 读取一批数据,然后将小批量数据发送给每个 GPU。
- 最新的模型从 GPU 0 复制到每个 GPU。
- 执行
forward,并将每个 GPU 的输出发送到 GPU 0 以计算损失。 - 损失从 GPU 0 分发到所有 GPU,然后运行
backward。 - 每个 GPU 的梯度被发送到 GPU 0 并平均。
关键差异包括:
- DDP 每个批次只进行一次通信 - 发送梯度,而 DP 每个批次进行五次不同的数据交换。DDP 使用 torch.distributed 复制数据,而 DP 通过 Python 线程(这会引入与 GIL 相关的限制)在进程内复制数据。因此,除非 GPU 之间的连接速度较慢,否则
DistributedDataParallel(DDP) 通常比DataParallel(DP) 更快。 - 在 DP 下,GPU 0 的工作量显著大于其他 GPU,导致 GPU 利用率低下。
- DDP 支持跨多台机器的分布式训练,而 DP 不支持。
这不是 DP 和 DDP 之间差异的详尽列表,但其他细微差别超出了本指南的范围。你可以通过阅读这篇文章来更深入地了解这些方法:使用 PyTorch 在 AWS 上进行分布式数据并行训练。
接下来,我们通过一个实验来说明 DP 和 DDP 之间的差异。我们将基准测试 DP 和 DDP 之间的差异,并添加 NVLink 是否存在的上下文:
- 硬件:2 块 TITAN RTX 24GB 每块 + NVlink,2 条 NVLink(在
nvidia-smi topo -m中显示为NV2)。 - 软件:
pytorch-1.8-to-be+cuda-11.0/transformers==4.3.0.dev0。
为了禁用其中一个基准测试的 NVLink 功能,我们使用 NCCL_P2P_DISABLE=1。
以下是基准测试代码和输出:
DP
rm -r /tmp/test-clm; CUDA_VISIBLE_DEVICES=0,1 \\
python examples/pytorch/language-modeling/run_clm.py \\
--model_name_or_path openai-community/gpt2 --dataset_name wikitext --dataset_config_name wikitext-2-raw-v1 \\
--do_train --output_dir /tmp/test-clm --per_device_train_batch_size 4 --max_steps 200
{'train_runtime': 110.5948, 'train_samples_per_second': 1.808, 'epoch': 0.69}
DDP w/ NVlink
rm -r /tmp/test-clm; CUDA_VISIBLE_DEVICES=0,1 \\
torchrun --nproc_per_node 2 examples/pytorch/language-modeling/run_clm.py \\
--model_name_or_path openai-community/gpt2 --dataset_name wikitext --dataset_config_name wikitext-2-raw-v1 \\
--do_train --output_dir /tmp/test-clm --per_device_train_batch_size 4 --max_steps 200
{'train_runtime': 101.9003, 'train_samples_per_second': 1.963, 'epoch': 0.69}
DDP w/o NVlink
rm -r /tmp/test-clm; NCCL_P2P_DISABLE=1 CUDA_VISIBLE_DEVICES=0,1 \\
torchrun --nproc_per_node 2 examples/pytorch/language-modeling/run_clm.py \\
--model_name_or_path openai-community/gpt2 --dataset_name wikitext --dataset_config_name wikitext-2-raw-v1 \\
--do_train --output_dir /tmp/test-clm --per_device_train_batch_size 4 --max_steps 200
{'train_runtime': 131.4367, 'train_samples_per_second': 1.522, 'epoch': 0.69}
为了方便起见,我们将上述基准测试结果汇总在下表中:
| 类型 | NVlink | 时间 |
|---|---|---|
| 2:DP | Y | 110s |
| 2:DDP | Y | 101s |
| 2:DDP | N | 131s |
如你所见,在这种情况下,DP 比带有 NVlink 的 DDP 慢约 10%,但比没有 NVlink 的 DDP 快约 15%。实际差异取决于每个 GPU 需要与其他 GPU 同步的数据量 - 需要同步的数据越多,较慢的连接对整体运行时间的影响就越大。
ZeRO 数据并行(ZeRO Data Parallelism)¶
由这篇博客文章中的图表展示了 ZeRO 优化的数据并行(ZeRO-DP)。
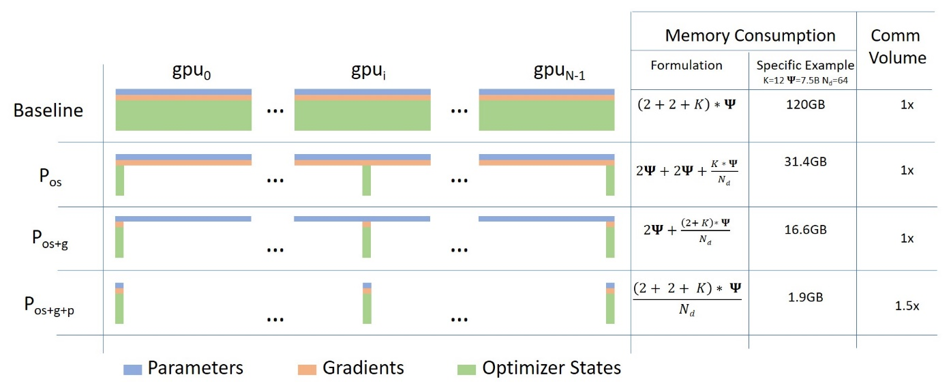
尽管看起来很复杂,但它与 DataParallel (DP) 的概念非常相似。不同之处在于,ZeRO 不再复制完整的模型参数、梯度和优化器状态,而是每个 GPU 只存储其中的一部分。然后,在运行时需要整个层的参数时,所有 GPU 会同步以互相传递缺失的部分。
为了说明这个概念,假设有一个简单的包含 3 层(La、Lb 和 Lc)的模型,每层有 3 个参数。例如,层 La 有参数 a0、a1 和 a2:
如果我们有 3 个 GPU,ZeRO-DP 会将模型拆分到 3 个 GPU 上,如下所示:
这种方式类似于张量并行(Tensor Parallelism)的水平切片,而不是垂直切片,后者将整个层组放在不同的 GPU 上。现在我们来看看它是如何工作的:
每个 GPU 都会像 DP 一样接收一个小批量数据:
输入数据未经修改,就像它们会被原始模型处理一样。
首先,输入数据到达层 La。此时会发生什么?
在 GPU0 上:小批量 x0 需要参数 a0、a1 和 a2 以完成前向传播,但 GPU0 只有 a0。它将从 GPU1 获取 a1,并从 GPU2 获取 a2,从而将模型的所有部分合在一起。
同时,GPU1 接收另一个小批量 x1。GPU1 有参数 a1,但需要 a0 和 a2,所以它从 GPU0 和 GPU2 获取这些参数。同样的,GPU2 接收小批量 x2,并从 GPU0 和 GPU1 获取 a0 和 a1。
这样,每个 GPU 都会重构完整的张量并使用自己的小批量进行前向传播。一旦计算完成,不再需要的数据就会被丢弃 - 它们只在计算过程中使用。重构通过预取高效完成。
然后,整个过程会重复应用于层 Lb,然后是 Lc 的前向传播,再接着是 Lc -> Lb -> La 的反向传播。
这种机制类似于高效的背包策略:A 人携带帐篷,B 人携带炉子,C 人携带斧头。每天晚上,他们会共享自己拥有的物品,并从其他人那里获取自己没有的物品。早上,他们收拾分配给自己的装备并继续前进。这就是 ZeRO DP/Sharded DDP。相比之下,每个人都必须携带自己的帐篷、炉子和斧头(类似于 PyTorch 中的 DataParallel (DP 和 DDP)),这会低效得多。
在阅读相关文献时,你可能会遇到以下同义词:Sharded、Partitioned。如果你仔细观察 ZeRO 如何分割模型的权重 - 它看起来非常类似于张量并行(Tensor Parallelism),这将在后面讨论。这是因为它分割/切片了每一层的权重,而不是垂直模型并行(Vertical Model Parallelism),这将在下一节中讨论。
实现:
- DeepSpeed ZeRO-DP 阶段 1+2+3
Accelerate集成transformers集成
从简单的模型并行到流水线并行¶
为了解释流水线并行(Pipeline Parallelism),我们先来看看简单的模型并行(Naive Model Parallelism,也称为 Vertical MP)。这种方法涉及将模型层组分布到多个 GPU 上,通过 .to() 将特定层分配给特定 GPU。随着数据流经这些层,数据会被移动到与层相同的 GPU 上,而其他层保持不变。
我们称这种模型并行为“垂直”的,因为模型通常是这样可视化的。例如,下图显示了一个 8 层模型垂直切分为两部分,将第 0 到第 3 层放在 GPU0 上,第 4 到第 7 层放在 GPU1 上:
在这个例子中,当数据从第 0 层传到第 3 层时,与常规前向传播没有区别。然而,将数据从第 3 层传到第 4 层需要将数据从 GPU0 移动到 GPU1,这会引入通信开销。如果参与的 GPU 在同一个计算节点上(例如同一台物理机),这种复制很快,但如果 GPU 分布在不同的计算节点上(例如多台机器),通信开销可能会大幅增加。
之后,第 4 到第 7 层的工作方式与原始模型相同。在第 7 层完成后,通常需要将数据发送回第 0 层(或反之,将标签发送到最后一层)。现在可以计算损失,优化器可以进行工作。
简单模型并行存在以下几个缺点:
- 任何时候只有一个 GPU 处于活跃状态:如果使用 4 个 GPU,这几乎等同于将单个 GPU 的内存容量增加四倍,而忽略其他硬件。
- 设备间的数据传输开销:例如,4 张 6GB 显卡可以容纳与一张 24GB 显卡相同大小的模型,但单张 24GB 显卡会更快完成训练,因为它没有数据复制开销。但是,如果你有 40GB 的显卡,需要容纳 45GB 的模型,可以使用 4 张 40GB 的显卡(但几乎不可能,因为还要考虑梯度和优化器状态)。
- 共享嵌入层的复制:共享嵌入层可能需要在 GPU 之间来回复制。
现在你已经熟悉了简单的模型并行如何工作及其缺点,我们来看流水线并行(Pipeline Parallelism,简称 PP)。PP 与简单的模型并行几乎相同,但它通过将传入批次切分为微批次并人工创建流水线,解决了 GPU 闲置问题,允许不同的 GPU 并行参与计算过程。
下图来自 GPipe 论文,展示了顶部的简单模型并行和底部的流水线并行:
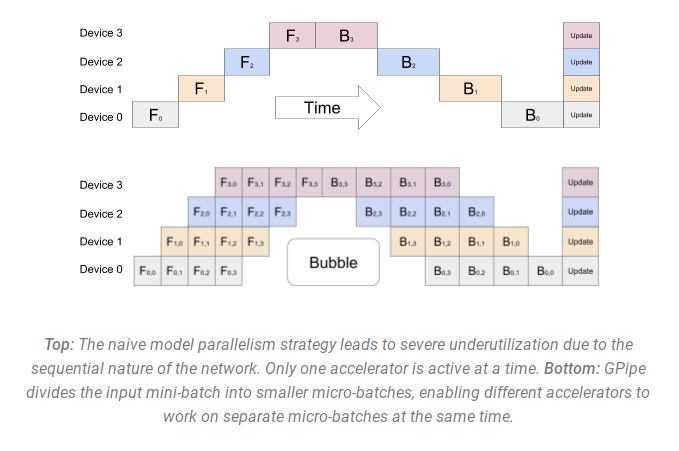
在图的底部,可以看到流水线并行(PP)方法最小化了被称为“气泡”的空闲 GPU 区域。两个部分都显示了并行度为 4,这意味着有 4 个 GPU 参与流水线。你可以看到,有一个前向路径的 4 个管道阶段(F0、F1、F2 和 F3),然后是反向路径按逆序(B3、B2、B1 和 B0)。
PP 引入了一个新的超参数来调整 - chunks,这决定了通过同一管道阶段发送的数据块的数量。例如,在底部的图中,你可以看到 chunks=4。GPU0 对数据块 0、1、2 和 3 进行相同的前向传播(F0,0、F0,1、F0,2、F0,3),然后等待其他 GPU 完成工作。只有当其他 GPU 开始完成它们的工作时,GPU0 才会再次开始工作,对数据块 3、2、1 和 0 进行反向传播(B0,3、B0,2、B0,1、B0,0)。
注意,这与梯度累积步骤的概念相同。PyTorch 使用 chunks,而 DeepSpeed 称之为梯度累积步骤。
由于 chunks,PP 引入了微批次(Micro-Batches,简称 MBS)的概念。DP 将全局数据批次大小切分为小批次,所以如果你的 DP 程度为 4,全局批次大小为 1024,将会被切分为 4 个小批次,每个小批次大小为 256(1024/4)。如果 chunks(或 GAS)为 32,我们最终得到的微批次大小为 8(256/32)。每个管道阶段一次处理一个微批次。要计算 DP + PP 设置的全局批次大小,使用公式:mbs * chunks * dp_degree(8 * 32 * 4 = 1024)。当 chunks=1 时,你会得到简单的 MP,这是低效的。当 chunks 值很大时,你会得到非常小的微批次,这也是低效的。因此,我们鼓励你尝试不同的 chunks 值,以找到最高效的 GPU 利用率。
你可能会注意到图中的一个“死区”,这部分不能并行化,因为最后一个 forward 阶段必须等待 backward 完成流水线。寻找最佳 chunks 值的目的是实现在所有参与的 GPU 上的高并发利用率,从而最小化“气泡”的大小。
流水线 API 解决方案已实现在:
- PyTorch
- DeepSpeed
- Megatron-LM
这些解决方案存在一些缺点:
- 它们需要对模型进行大量修改,因为流水线要求将正常模块流程重写为
nn.Sequential序列,这可能需要对模型设计进行更改。 - 当前的流水线 API 非常受限。如果你在流水线的第一阶段传递了一组 Python 变量,你必须找到变通方法。目前,流水线接口要求输入和输出只能是一个 Tensor 或一组 Tensors。这些 Tensors 必须在第一个维度上有批次大小,因为流水线会将小批次切分为微批次。相关改进正在讨论中:https://github.com/pytorch/pytorch/pull/50693
- 无法在管道阶段的条件控制流 - 例如,T5 编码器-解码器模型需要特殊的工作around来处理条件编码阶段。
- 它们需要安排每个层,使得一个层的输出成为另一个层的输入。
更近期的解决方案包括:
- Varuna
- Sagemaker
我们还没有尝试过 Varuna 和 SageMaker,但它们的论文报告称,它们克服了上述问题,并且需要对用户模型进行较小的修改。
实现:
- PyTorch(初始支持在 pytorch-1.8,1.9 和 1.10 版本中逐步改进)。一些 示例
- DeepSpeed
- Megatron-LM 有一个内部实现 - 没有 API。
- Varuna
- SageMaker - 这是一个专有解决方案,只能在 AWS 上使用。
- OSLO - 这是基于 Hugging Face Transformers 实现的。
🤗 Transformers 状态:截至本文写作时,没有任何模型支持全 PP。GPT2 和 T5 模型支持简单的 MP。主要障碍是无法将模型转换为 nn.Sequential 并确保所有输入都是 Tensors。这是因为在当前的模型中包含了许多特性,使得转换非常复杂,需要移除这些特性才能实现。
DeepSpeed 和 Megatron-LM 集成可用在 🤗 Accelerate 中。
其他方法:
DeepSpeed、Varuna 和 SageMaker 使用了 交错流水线 的概念。

这里通过优先进行反向传播进一步最小化了“气泡”(空闲时间)。Varuna 进一步尝试通过模拟来发现最有效的调度。
OSLO 采用了基于 Transformers 的流水线并行实现,无需进行 nn.Sequential 转换。
张量并行(Tensor Parallelism)¶
在张量并行(Tensor Parallelism)中,每个 GPU 处理张量的一个切片,并在需要时聚合完整的张量。为了描述这种方法,本指南的这一部分依赖于 Megatron-LM 论文 Efficient Large-Scale Language Model Training on GPU Clusters 中的概念和图表。
任何变换器的核心组成部分是一个全连接的 nn.Linear 层,后跟一个非线性激活函数 GeLU。根据 Megatron 论文的记号,它的点积部分可以表示为 Y = GeLU(XA),其中 X 是输入向量,Y 是输出向量,A 是权重矩阵。
如果我们以矩阵形式查看计算过程,可以看到矩阵乘法可以如何在多个 GPU 之间拆分:
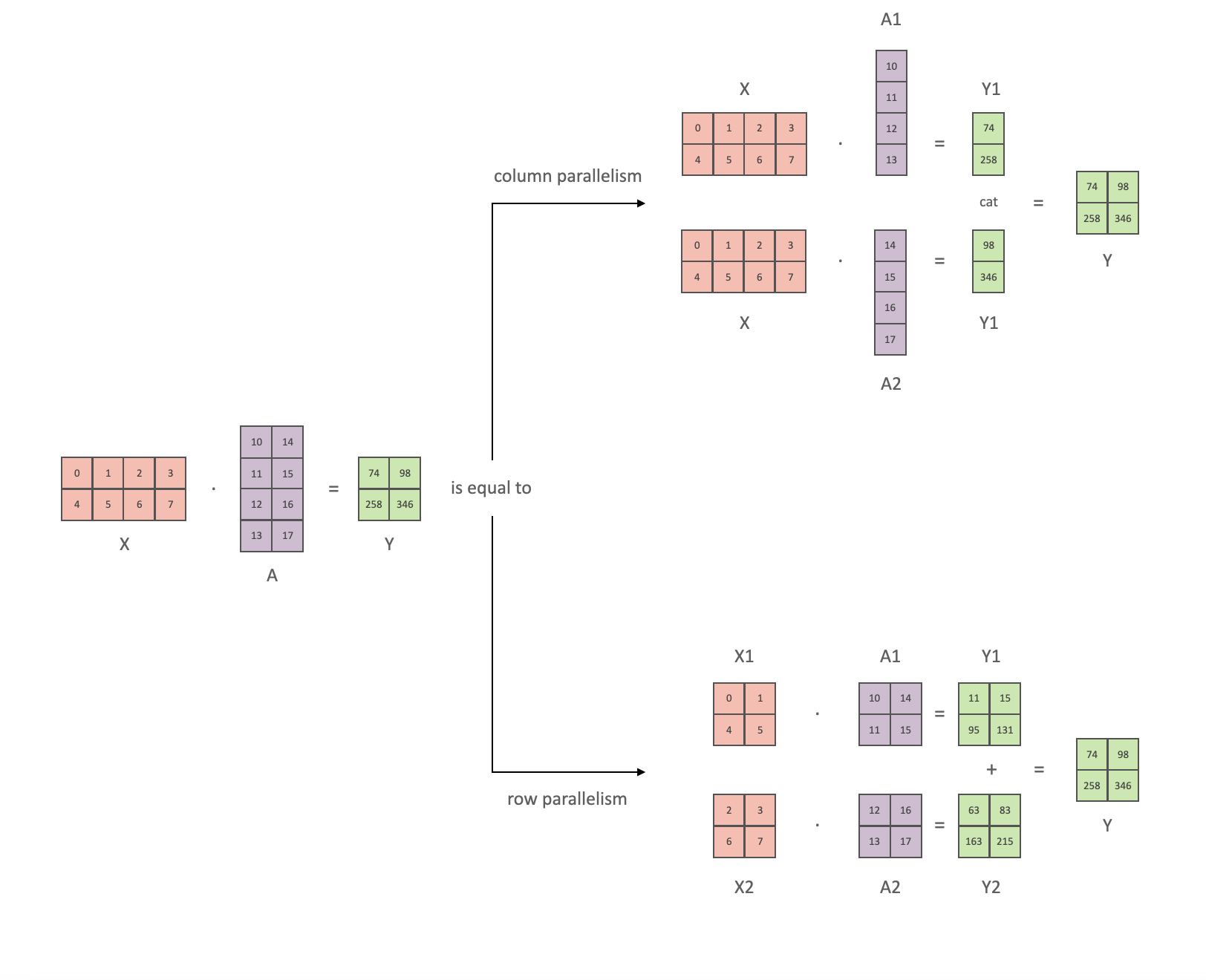
如果我们按列拆分权重矩阵 A 并在 N 个 GPU 上并行执行矩阵乘法 XA_1 到 XA_n,我们将得到 N 个输出向量 Y_1, Y_2, ..., Y_n,这些向量可以独立地输入 GeLU 函数:

基于这一原则,我们可以更新任意深度的多层感知器(MLP),而无需在 GPU 之间进行同步,直到最后一步,需要从分片中重建输出向量。Megatron-LM 论文的作者提供了一个有用的插图:
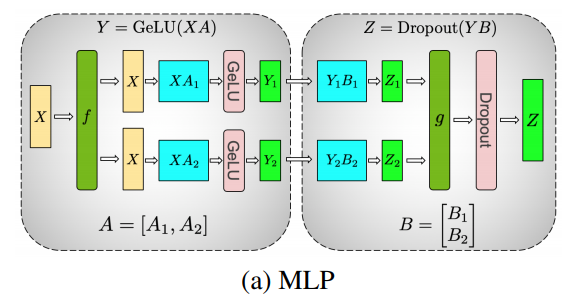
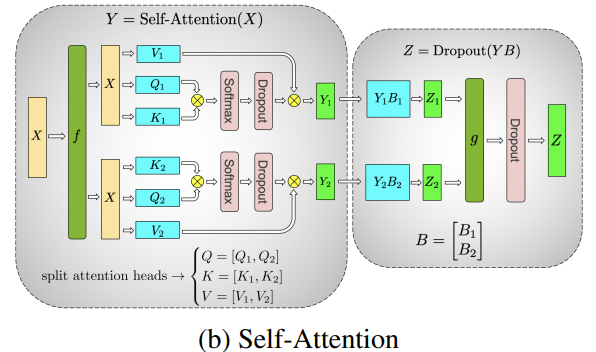
多头自注意力层的并行化更简单,因为它们本身就是并行的,具有多个独立的头!
特别注意事项:TP 需要非常快的网络,因此不建议跨多个节点进行 TP。实际上,如果一个节点有 4 个 GPU,则最高 TP 程度为 4。如果你需要 TP 程度为 8,需要使用至少有 8 个 GPU 的节点。
本节基于 @anton-l 的 详细 TP 概述。
其他名称:
- DeepSpeed 称之为 张量切片
实现:
- Megatron-LM 有一个内部实现,因为它非常特定于模型。
- parallelformers(目前仅支持推理)
- SageMaker - 这是一个专有解决方案,只能在 AWS 上使用。
- OSLO 有一个基于 Transformers 的张量并行实现。
SageMaker 结合了 TP 和 DP 以实现更高效的处理。
🤗 Transformers 状态:
- 核心部分:尚未实现在核心部分
- 但如果你需要推理,parallelformers 为大多数模型提供了支持。因此,你可以在核心实现之前使用它。希望训练模式也会得到支持。
- Deepspeed-Inference 还支持我们的 BERT、GPT-2 和 GPT-Neo 模型的超快速 CUDA 内核推理模式,更多详情请参阅 这里
🤗 Accelerate 集成了 Megatron-LM 的 TP。
数据并行 + 流水线并行¶
下图来自 DeepSpeed 流水线教程,展示了如何结合 DP 和 PP。
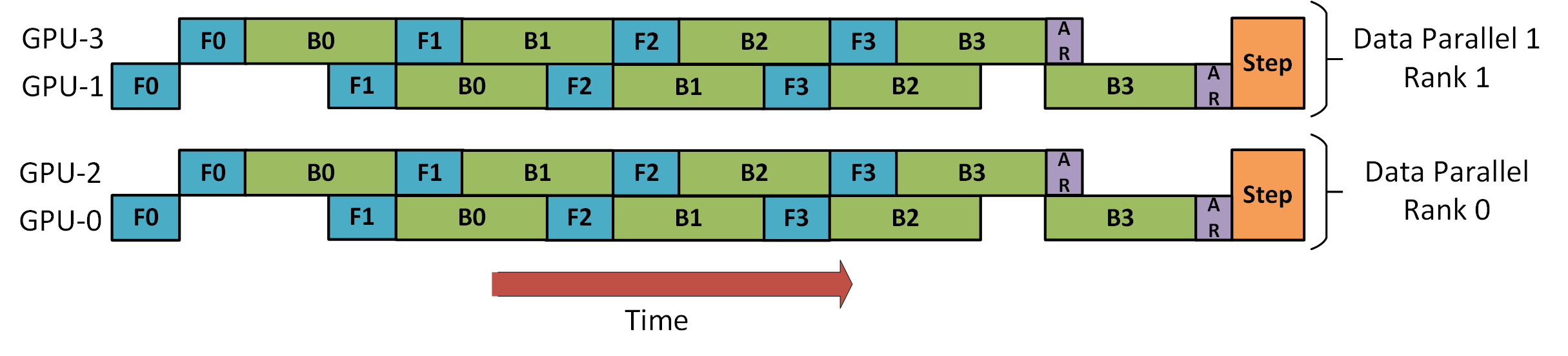
这里重要的是看到 DP 排名 0 不能看到 GPU2,而 DP 排名 1 不能看到 GPU3。对于 DP 来说,只有 GPU0 和 GPU1,就像只有 2 个 GPU 一样,数据被送入这两个 GPU。GPU0 会“秘密地”将部分负载卸载到 GPU2,使用 PP。同样,GPU1 也会利用 GPU3 的帮助。
由于每个维度至少需要 2 个 GPU,这里你需要至少 4 个 GPU。
实现:
🤗 Transformers 状态:尚未实现在核心部分
数据并行 + 流水线并行 + 张量并行¶
为了实现更高效的训练,3D 并行化将 PP 与 TP 和 DP 结合起来。这可以从下图中看出。
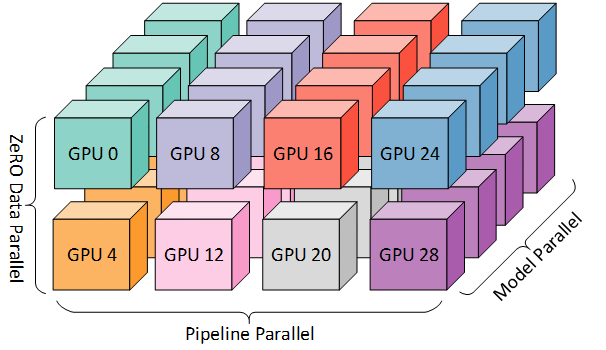
此图来自一篇博客文章 3D 并行化:扩展到万亿参数模型,这篇文章也值得阅读。
由于每个维度至少需要 2 个 GPU,这里你需要至少 8 个 GPU。
实现:
- DeepSpeed - DeepSpeed 还包括一个更高效的 DP,称为 ZeRO-DP。
- Megatron-LM
- Varuna
- SageMaker
- OSLO
🤗 Transformers 状态:尚未实现在核心部分,因为我们没有 PP 和 TP。
ZeRO 数据并行 + 流水线并行 + 张量并行¶
DeepSpeed 的一个主要特点是 ZeRO,这是一个超级可扩展的 DP 扩展。已经在 ZeRO 数据并行 部分讨论过。通常它是一个独立的功能,不需要 PP 或 TP。但可以与 PP 和 TP 结合使用。
当 ZeRO-DP 与 PP(可选 TP)结合时,通常只启用 ZeRO 第 1 阶段(优化器切片)。
理论上可以在流水线并行中使用 ZeRO 第 2 阶段(梯度切片),但这会对性能产生负面影响。每个微批次都需要一个额外的 reduce-scatter 集体操作来聚合梯度,然后再切片,这会增加潜在的通信开销。由于流水线并行的性质,使用较小的微批次,重点在于平衡算术强度(微批次大小)与最小化流水线气泡(微批次数量)。因此,这些通信成本会影响性能。
此外,由于 PP 已经减少了层数,因此内存节省不会很大。PP 已经将梯度大小减少了 1/PP,因此在纯 DP 上的梯度切片节省不太显著。
ZeRO 第 3 阶段也不是一个好的选择,原因相同 - 需要更多的节点间通信。
由于我们有 ZeRO,另一个好处是 ZeRO-Offload。在第 1 阶段,优化器状态可以卸载到 CPU。
实现:
重要论文:
🤗 Transformers 状态:尚未实现在核心部分,因为我们没有 PP 和 TP。
FlexFlow¶
FlexFlow 以稍微不同的方法解决了并行化问题。
论文:“超越深度神经网络的数据并行和模型并行” by Zhihao Jia, Matei Zaharia, Alex Aiken
它在样本、算子、属性和参数四个维度上进行 4D 并行化。
- 样本 = 数据并行(样本并行)
- 算子 = 将单个操作并行化为多个子操作
- 属性 = 数据并行(长度并行)
- 参数 = 模型并行(无论维度 - 水平或垂直)
示例:
- 样本
假设我们有 10 批序列长度为 512。如果在样本维度上并行化为 2 个设备,我们会得到 10 x 512,变为 5 x 2 x 512。
- 算子
如果执行层归一化,我们先计算标准差,再计算均值,然后进行数据归一化。算子并行化允许并行计算标准差和均值。因此,如果我们在算子维度上并行化为 2 个设备(cuda:0, cuda:1),首先将输入数据复制到两个设备,cuda:0 计算标准差,cuda:1 同时计算均值。
- 属性
我们有 10 批长度为 512 的数据。如果在属性维度上并行化为 2 个设备,10 x 512 会变成 10 x 2 x 256。
- 参数
类似于张量模型并行或逐层模型并行。
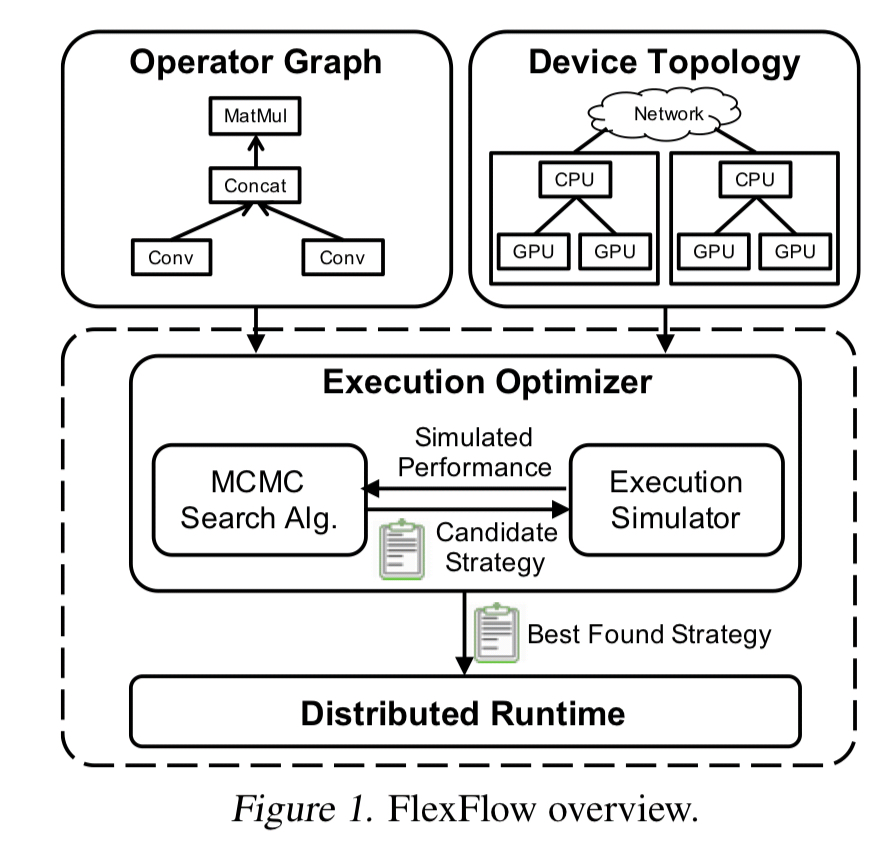
该框架的重要意义在于,它会根据资源(1)GPU/TPU/CPU vs. (2)RAM/DRAM vs. (3)快速内部连接/缓慢外部连接,自动优化算法决定在哪里使用哪种并行化。
非常重要的一点是,FlexFlow 适用于静态和固定工作负载的模型并行化优化,因为动态行为的模型可能在不同迭代中需要不同的并行化策略。
因此,该框架的前景非常诱人 - 它可以在选定的集群上运行 30 分钟的模拟,然后提出最佳策略以利用该特定环境。如果你添加、移除或替换任何部分,它会重新优化计划。然后你可以进行训练。不同的设置会有自己的定制优化。
🤗 Transformers 状态:Transformers 模型可以通过 transformers.utils.fx 进行 FX 跟踪,这是 FlexFlow 的先决条件,但需要在 FlexFlow 方面进行更改以使其与 Transformers 模型兼容。
GPU 选择¶
在多个 GPU 上训练时,你可以指定使用的 GPU 数量和顺序。这在你有不同计算能力的 GPU 且希望先使用较快的 GPU 时非常有用。选择过程适用于 DistributedDataParallel 和 DataParallel,使用它们只需要部分可用的 GPU,而不需要 Accelerate 或 DeepSpeed 集成。
GPU 数量¶
例如,如果你有 4 个 GPU 且只想使用前 2 个:
torchrun
Accelerate
DeepSpeed
使用 --nproc_per_node 选择要使用的 GPU 数量。
torchrun --nproc_per_node=2 trainer-program.py ...
GPU 顺序¶
现在,要选择要使用的 GPU 及其顺序,你将使用 CUDA_VISIBLE_DEVICES 环境变量。最简单的方法是在 ~/bashrc 或其他启动配置文件中设置环境变量。CUDA_VISIBLE_DEVICES 用于映射哪些 GPU 被使用。例如,如果你有 4 个 GPU(0、1、2、3)且只想要运行 GPU 0 和 2:
CUDA_VISIBLE_DEVICES=0,2 torchrun trainer-program.py ...
只有 2 个物理 GPU(0 和 2)对 PyTorch 是“可见”的,它们分别被映射到 cuda:0 和 cuda:1。你也可以反转 GPU 的顺序,先使用 GPU 2。现在,映射关系是 cuda:1 对应 GPU 0,cuda:0 对应 GPU 2。
CUDA_VISIBLE_DEVICES=2,0 torchrun trainer-program.py ...
你还可以将 CUDA_VISIBLE_DEVICES 环境变量设置为空值,以创建一个没有 GPU 的环境。
CUDA_VISIBLE_DEVICES= python trainer-program.py ...
像任何环境变量一样,它们可以导出而不是添加到命令行中。然而,这不推荐,因为如果你忘记环境变量是如何设置的,可能会使用错误的 GPU。相反,常见做法是在特定训练运行的同一命令行中设置环境变量。
CUDA_DEVICE_ORDER 是另一个可以用来控制 GPU 顺序的环境变量。你可以按照以下方式排序:
- 使用 PCIe 总线 ID,这与 NVIDIA 和 AMD GPU 的
nvidia-smi和rocm-smi的顺序匹配:
export CUDA_DEVICE_ORDER=PCI_BUS_ID
- 按 GPU 计算能力排序:
export CUDA_DEVICE_ORDER=FASTEST_FIRST
CUDA_DEVICE_ORDER 尤其有用,如果你的训练设置包含旧 GPU 和新 GPU,且旧 GPU 优先出现,但你无法物理更换显卡以使新 GPU 优先出现。在这种情况下,设置 CUDA_DEVICE_ORDER=FASTEST_FIRST 以始终优先使用更新和更快的 GPU(nvidia-smi 或 rocm-smi 仍然按 PCIe 顺序报告 GPU)。或者你也可以设置 export CUDA_VISIBLE_DEVICES=1,0。