A070-基于空间众包的动态物流配送路径智能规划系统
【购买前必看】
1、关于我们
深度学习乐园是由python哥全职技术团队组建运营【团队成员为:复旦大学博士、华东理工爱丁堡博士、格拉斯哥博士、纽约大学硕士、浙江大学硕士】。
我们只做python业务,精通sklearn机器学习/torch深度学习/django/flask/vue全栈开发。
2、关于项目
我们从2018年开始,就专注于深度学习sci、ei、ccf、kaggle等,至今已有7年,共发表过10多篇顶刊顶会。
官网累积了数百个项目,已有3000多学员付费购买,圈子内有口皆碑:www.zzgcz.com (更多高级私密项目无法对外,联系微信定制:zzgcz_com)
3、售后承诺
包远程安装调试,所有项目均在本地运行通过,大部分都有截图和录屏。
支持二次修改,所有项目都是我们自己写的,改起来也非常容易。
加急定制1-2天可完成,这就是实力证明,远程验收满意后再付全款!
所有客户终身售后。兼职的人家都有主业,谁愿意持续服务你?
1. 项目简介
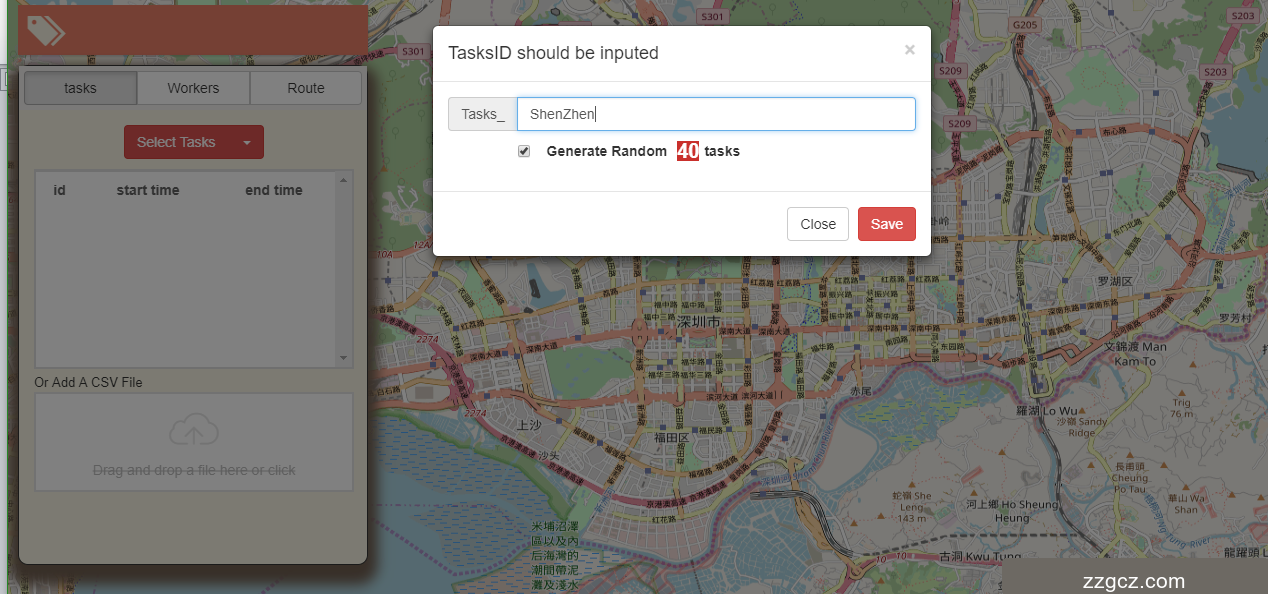
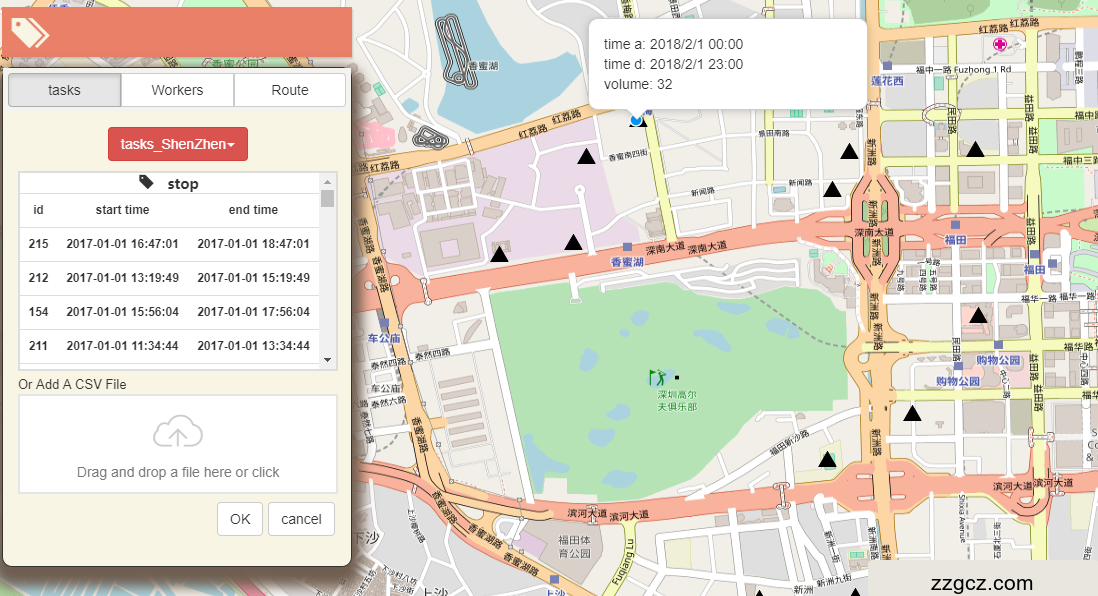
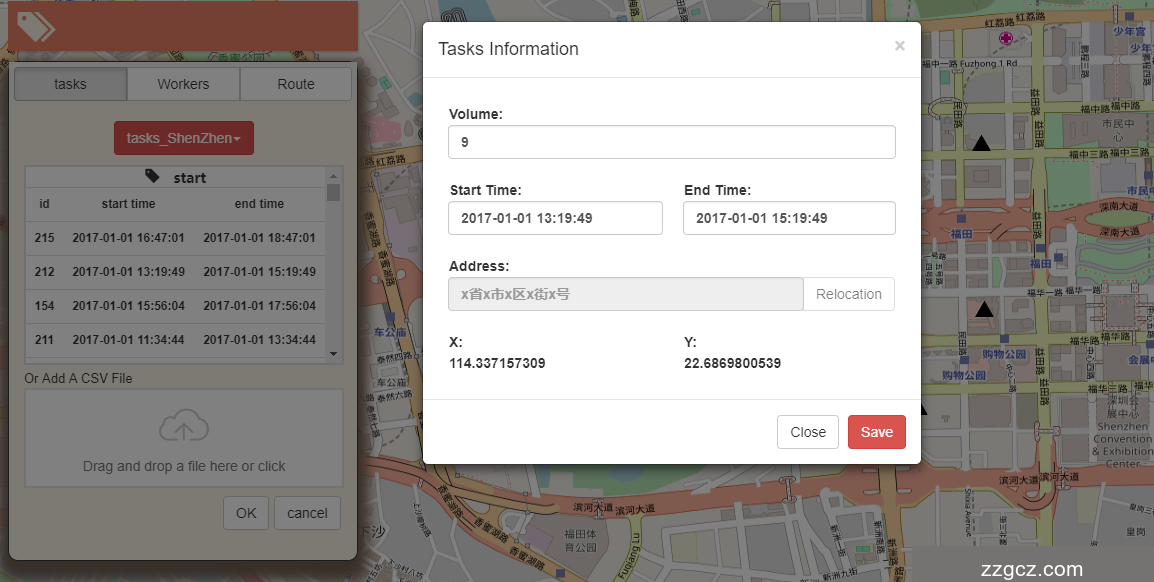
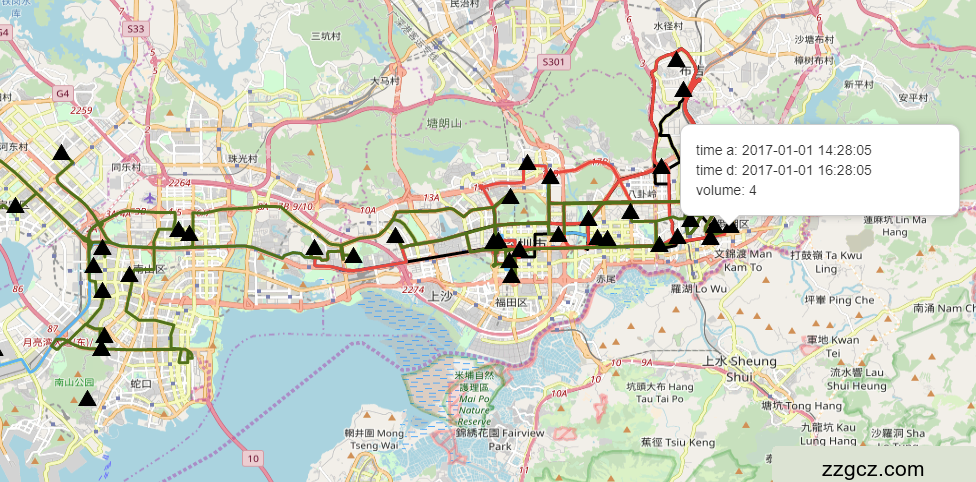
本项目“A070-基于空间众包的动态物流配送路径智能规划系统”旨在通过利用空间众包与深度学习算法,解决复杂的物流配送路径优化问题。该系统的目标是为物流配送任务提供智能化的路径规划,减少配送时间和资源消耗。项目结合了基于高德地图API的地理位置服务,通过多种坐标转换方法来精准处理配送节点的坐标。使用多种算法如基本算法(时间、距离、时空临近)和禁忌搜索算法,对配送任务进行路径优化。算法根据任务的地理位置、时间窗口和容量限制等因素,动态规划出最优路径。系统通过Flask框架进行前后端交互,前端发送配送任务的相关信息,后端通过算法计算出最优路径并返回给前端。
2.技术创新点摘要
基于坐标转换的精准位置服务:项目通过整合多种坐标转换算法,如WGS84、GCJ-02和BD-09之间的转换(在coord_transform.py中实现),确保了不同地图系统间的坐标统一性。这种转换对物流配送任务的精确规划至关重要,因为它保证了不同任务节点的地理信息在不同坐标系下的准确性,特别是当项目涉及高德地图API时,这一功能成为关键点。
利用高德地图API进行距离矩阵计算:通过get_dismatrix.py中的高德地图API接口,系统能动态获取配送节点之间的距离并生成可视化路径。这种外部地图服务的集成,使得系统能够处理复杂的地理信息任务,极大地提升了路径规划的实际可用性。
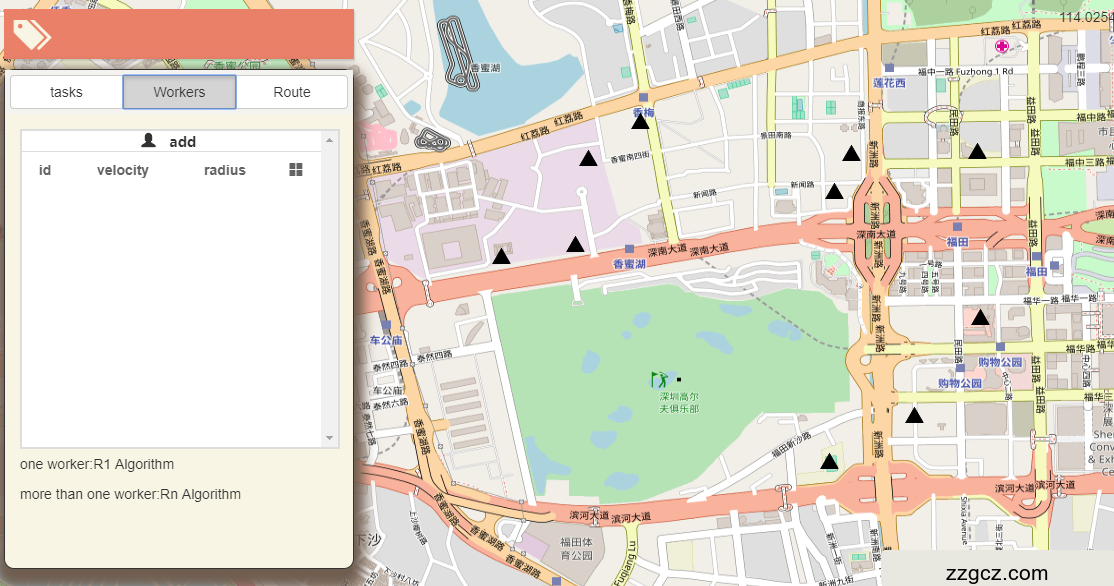
多种算法的融合与创新:项目中融合了多个算法进行任务路径规划,包括基本算法(时间、距离、时空临近)和禁忌搜索算法(在tabu_search.py中实现)。禁忌搜索算法通过动态调整禁忌表、邻域搜索等手段,优化了路径规划过程,避免了局部最优的陷阱。此外,系统还基于执行任务的时空距离矩阵,针对任务的动态特性,进行多阶段路径调整。这种算法的组合和时空距离的考量,增强了系统处理动态任务的能力。
空间众包任务的动态规划:项目的一个重要创新点是基于空间众包的动态任务规划(在initi_algorithm.py中详细体现)。系统能根据任务的发布顺序、时间窗口、任务容量等因素,实时调整配送路径。这种动态调整极大地提高了系统的灵活性,能够根据任务的变化优化规划。
任务节点可视化与前后端联动:通过Flask框架(flask_sc.py)的应用,系统前端能向后端发送任务请求,后端基于算法计算最优路径并实时返回结果。这种前后端紧密结合的架构设计,实现了任务节点与路径的可视化,便于用户对任务执行过程的监控与调整。
4. 模型架构
1) 模型结构的逻辑
该系统主要分为以下几个模块:
-
坐标转换模块:
-
代码文件
coord_transform.py中实现了 WGS84、GCJ-02 和 BD-09 坐标系之间的转换算法。该模块的作用是确保不同地图系统(如高德、百度等)下的坐标能够无缝转换,从而提供精准的地理位置服务。该模块是系统中任务定位和路径规划的基础。 -
任务生成与距离计算模块:
-
在
get_dismatrix.py中,通过调用高德地图 API,系统根据配送任务点生成距离矩阵和可视化矩阵。系统根据配送任务点的地理坐标,计算两点之间的实际距离以及路径节点。这些数据会在后续路径优化中被用作输入。 -
基础算法模块:
-
initi_algorithm.py实现了基本算法,包括距离、时间、时空临近等策略。任务按照这些规则进行排序,生成初始的任务路径。这些基础算法提供了基本的路径规划解决方案,为后续高级算法提供参考和比较。 -
禁忌搜索算法模块:
-
tabu_search.py继承并扩展了基础算法,利用禁忌搜索算法进一步优化路径规划。该算法通过避免局部最优解、动态调整禁忌表、进行邻域变换,探索出更优的路径。这是系统中的核心优化算法之一。 -
前后端交互模块:
-
flask_sc.py实现了基于 Flask 的前后端交互,前端通过发送任务请求给后端,由后端的算法模块进行路径规划计算,并将结果以 JSON 格式返回给前端。这部分的设计支持任务的动态规划和实时结果反馈。
5. 核心代码详细讲解
1. coord_transform.py — 坐标转换模块
详细解释:
-
gcj02_to_bd09是将 GCJ-02(火星坐标系)转换为 BD-09(百度坐标系)的核心函数。 -
lng和lat是输入的经度和纬度,它们分别代表火星坐标系中的经纬度。 -
z和theta是极坐标形式下的距离和角度,通过这些中间值,进行坐标转换。 -
bd_lng和bd_lat是最终转换成的百度坐标系的经纬度。 -
这种坐标转换非常重要,特别是在物流场景中,不同的地图系统使用不同的坐标系,准确的转换可以确保地理信息的统一性。
2. get_dismatrix.py — 距离矩阵计算模块
详细解释:
-
request_dis通过高德地图API获取两个任务点之间的驾车距离和详细的路径信息。 -
start和dest是输入的起点和终点坐标,格式为字符串('经度,纬度')。 -
KEYS是多个API的密钥集合,系统随机选择一个密钥来防止请求频率过高。 -
dive是向高德API发出的HTTP请求,使用驾车模式进行路径计算。 -
requests.get(dive)发送API请求,返回两点间的距离和详细路径节点信息。 -
dis是返回的两点间距离,单位为米。 -
plot是路径的详细节点信息,方便后续可视化展示和进一步优化。
3. initi_algorithm.py — 基础算法模块
详细解释:
-
get_sp_matrix计算时空距离矩阵,结合空间距离(地理位置)和时间距离(任务的时间窗口)对路径进行优化。 -
sp_matrix是一个二维矩阵,用于存储每两个任务之间的时空距离。 -
dis是从dis_matrix中提取的两个任务点之间的空间距离,并将其转换为千米。 -
t_dis是两个任务的时间差乘以配送速度,得到时间距离,也转换为千米。 -
sp_dis结合了空间距离和时间距离,使用欧几里得距离公式计算出时空距离。 -
最终结果是每个任务点之间的时空距离矩阵,用于后续的路径规划和优化。
4. tabu_search.py — 禁忌搜索算法模块
详细解释:
-
get_neighbor是禁忌搜索的邻域变换核心函数,用于生成邻域解。 -
path_id提取当前路径中的任务ID。 -
path_out是尚未被包含在当前路径中的任务,作为候选。 -
p是从禁忌表中选出的禁忌对象,用于避免搜索过程中陷入局部最优解。 -
rule随机选择邻域变换规则: -
规则1(插入):从候选任务中随机选择一个插入到当前路径中。
-
规则2(内部交换):在路径内部随机交换两个任务的顺序。
-
规则3(内外交换):将路径中的一个任务与候选任务中的一个进行交换。
-
最终返回的是新的路径
temp_path及禁忌对象p,供后续迭代使用。
6. 模型优缺点评价
优点:
-
多算法结合:该系统采用多种算法进行路径规划,包括基本算法(时间、距离、时空临近)和禁忌搜索算法,这些方法在不同条件下均能有效优化路径,确保了模型的灵活性和适应性。
-
高效的坐标转换:利用
coord_transform.py中的坐标转换功能,系统能够处理多种地图系统间的坐标差异,保证了任务定位的精准性,特别是在物流场景中,保证了多平台间数据一致性。 -
动态任务调度:该模型能根据任务发布的时间窗口、容量限制等条件进行实时动态调整,支持复杂的物流场景需求。这种动态规划能力使得模型在面对不确定性和实时变化的任务时,具有更强的适应性。
-
集成外部API:模型集成了高德地图API,能够获取真实环境中的距离数据,提升了路径规划的实际应用价值。
缺点:
-
缺乏深度学习模型:尽管系统涉及复杂的路径规划,但并没有应用深度学习方法,模型的创新更多体现在算法层面,而非学习与预测能力。依赖规则和算法的模型在面对更大规模、更多样化的数据时,可能难以扩展。
-
超参数调整不足:禁忌搜索算法中的一些超参数(如禁忌表长度、迭代次数)是通过经验值设定的,并没有进行系统性调优,这可能影响最终结果的优化效果。
-
数据有限:目前的模型数据主要依赖高德地图API,数据规模有限。如果任务量增加或涉及更大区域的配送场景,模型的扩展性可能受限。
改进方向:
-
引入深度学习模型:可尝试引入强化学习或神经网络等深度学习方法,结合已有的路径规划算法,学习复杂场景下的最优路径规划策略。
-
超参数调优:通过网格搜索、随机搜索或贝叶斯优化等方法,系统性地调整禁忌搜索算法中的超参数,提高模型的性能。
-
更多数据增强:可考虑加入历史任务数据、天气数据等影响物流效率的因素,增强模型的决策能力